- 东莞市常盈五金有限公司

- 全国服务热线
13925799771
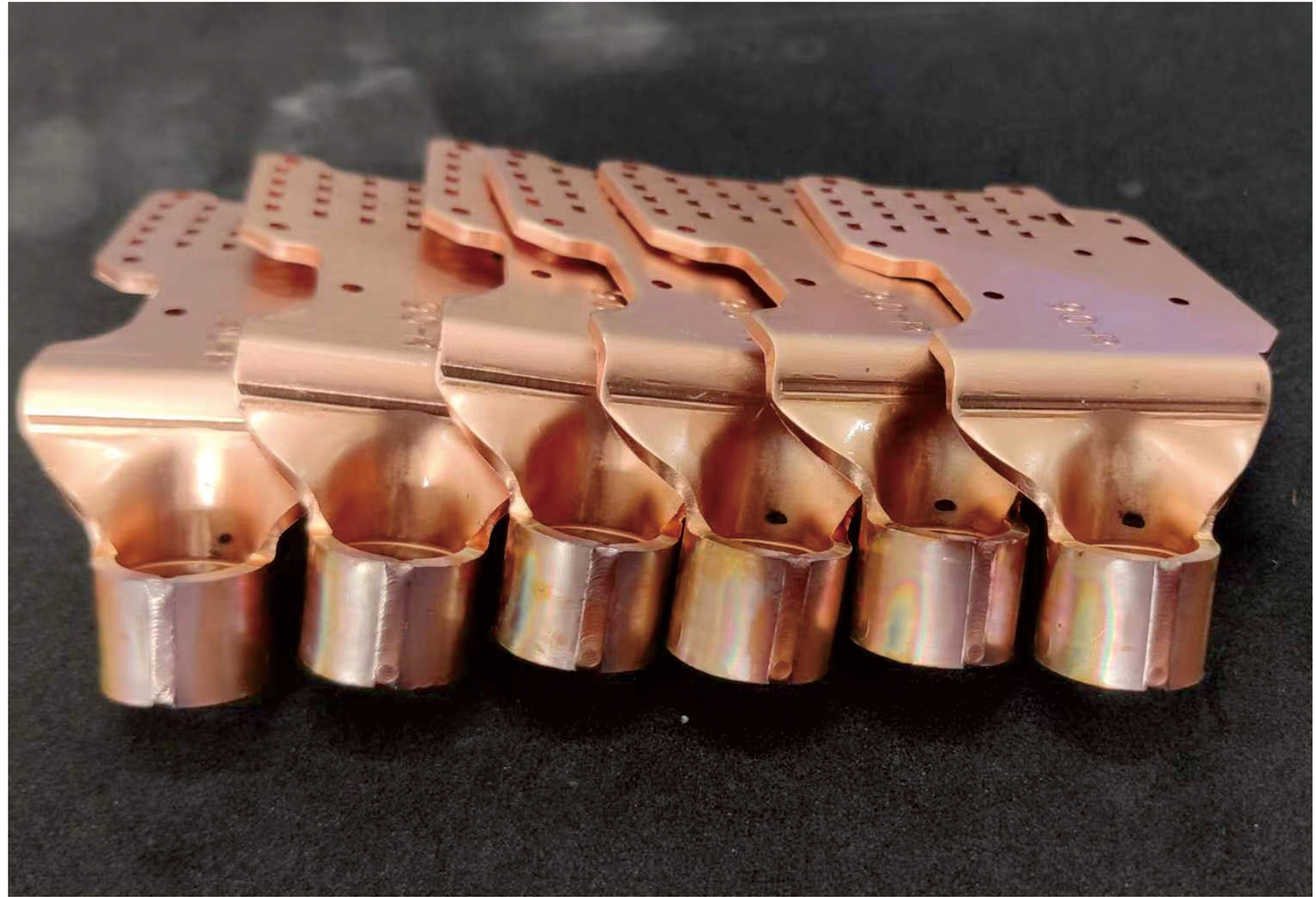
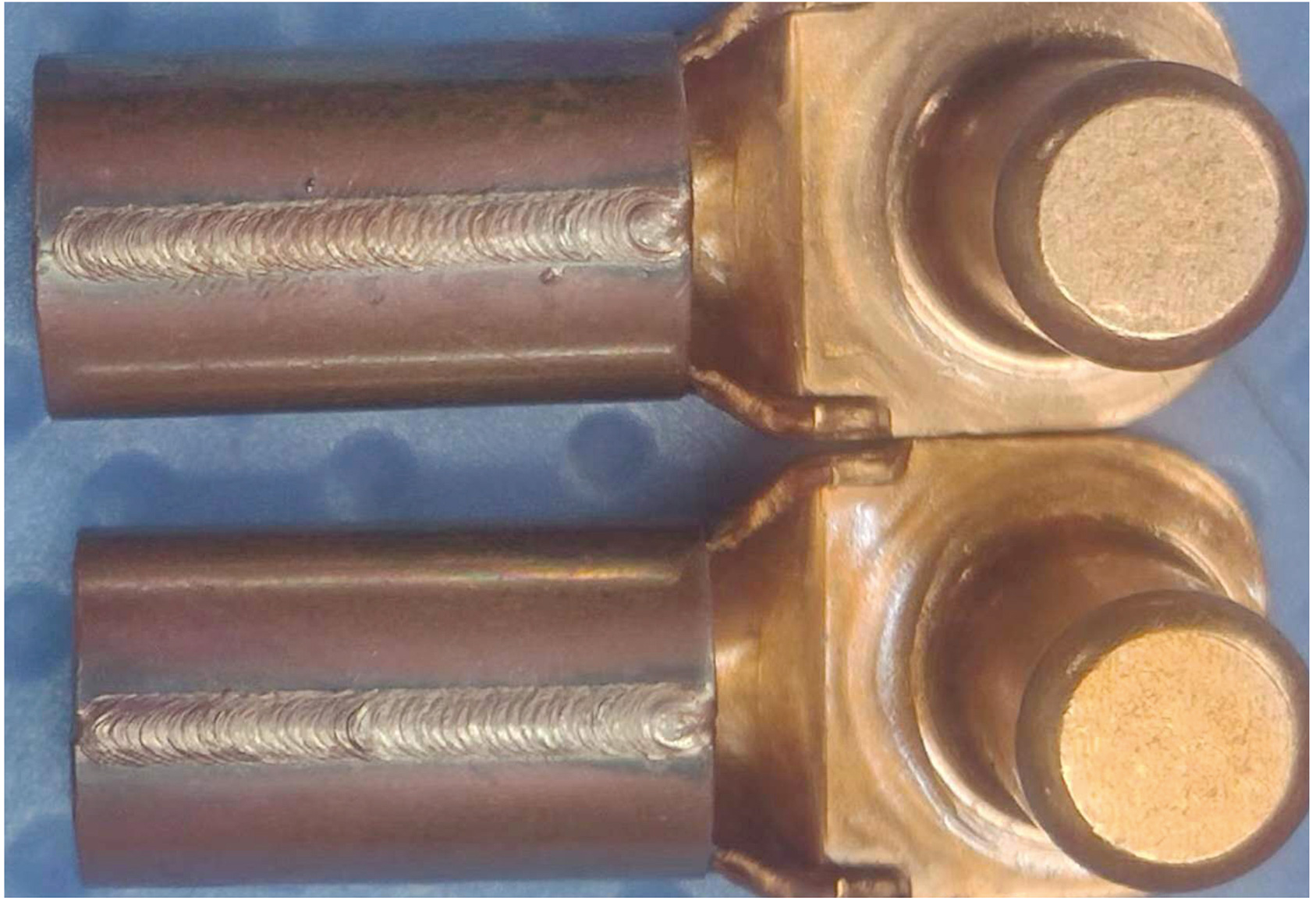
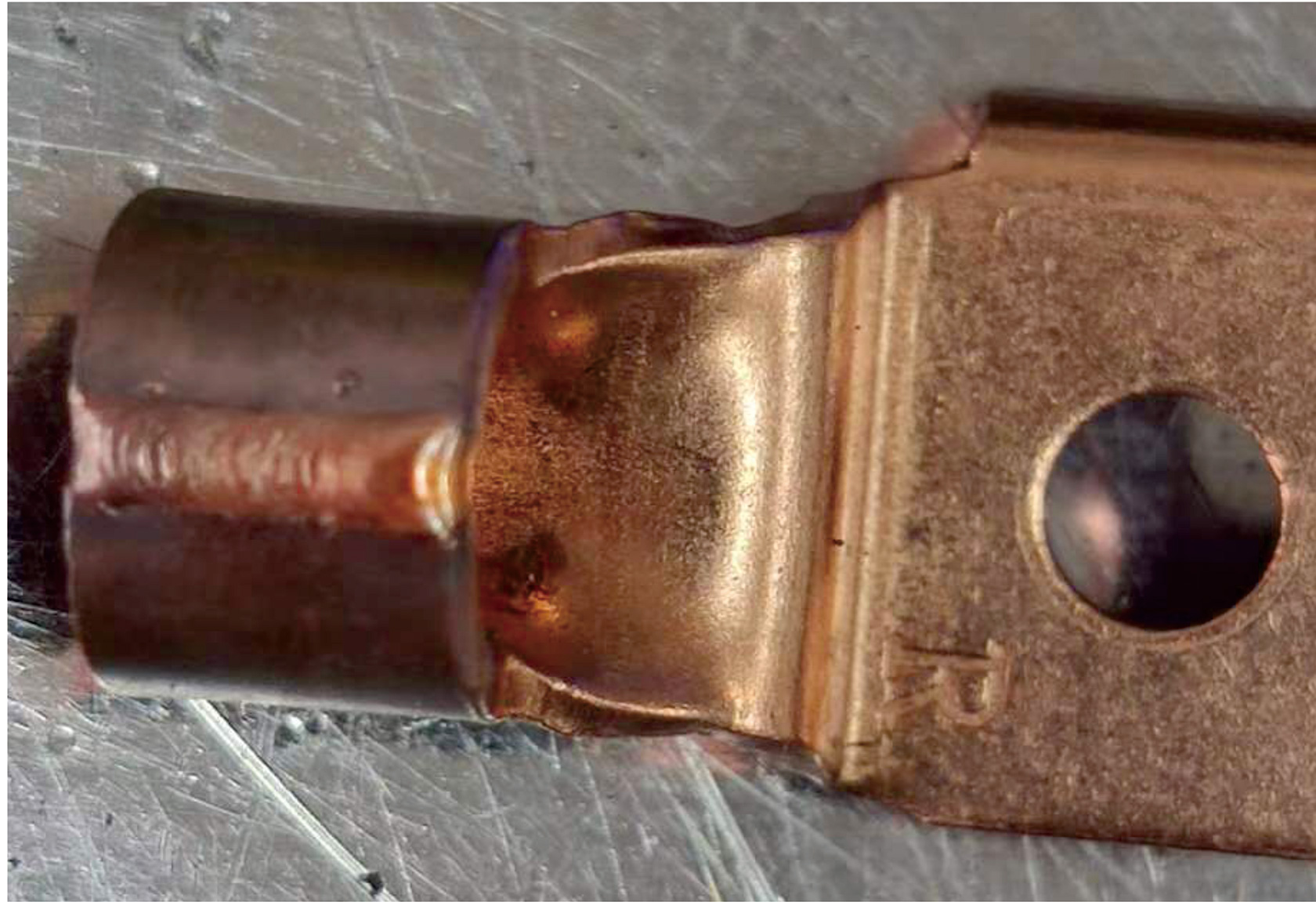
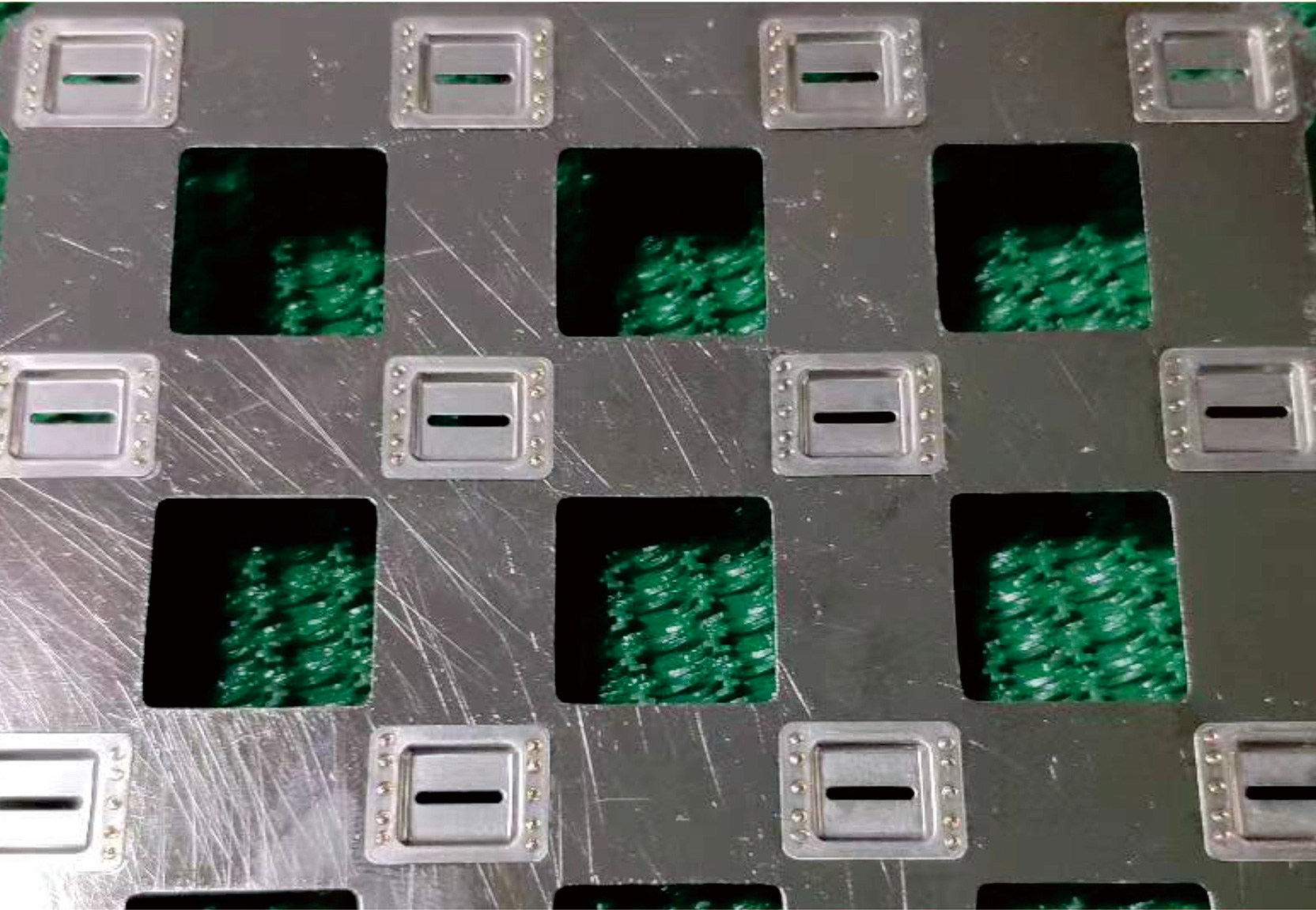
主营紫铜激光焊接加工、铝合金激光焊接加工、不锈钢激光焊接加工、铁制品、镀锌板激光焊接加工,有需要欢迎咨询!
 东莞市常盈五金有限公司
东莞市常盈五金有限公司
使用填充焊丝,活跃气体和保护气体的激光焊接
传感器
传感器用于检测和调节某些参数,包括工作距离、激光束在接缝间隙的位置、光学透镜调整角度以及填充材料的数量,以保证零件加工过程中的焊接质量,并且检测出劣质的零件。
1 焊缝跟踪
当激光束用来焊接材料中的对接接头时,追踪接缝间隙轨迹和正确定位激光束,确保激光束保持在接缝间隙的同一个位置。
2 保持监视整个过程
可以将传感器系统结合来实现对焊接过程更全面的监测。包括“焊接前”、“焊接内”、“焊接后”传感器。
焊接前传感器位于焊点之前追踪焊缝和定位激光束。焊接中传感器在焊接中使用照相机或者二极管检测焊接过程,基于相机的系统分析锁眼和焊接池,采用二极管的系统能够检测加工光、热辐射或者反射激光的强度。焊接后传感器检查完成的焊点,确定焊点是否符合质量要求。
传感器依靠程序化的极限值来区别零件的优劣。
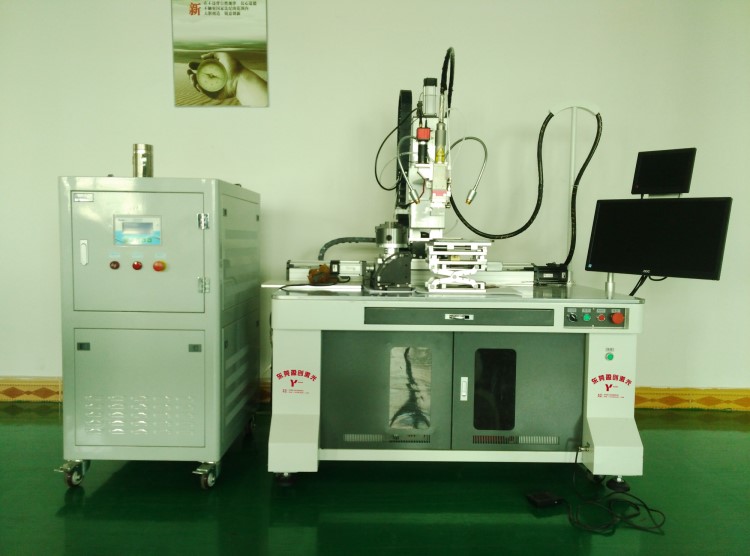
激光焊接机
激光焊接机的设计取决于很多因素,如工件形状、焊接几何结构、焊接类型、生产量、生产自动化程度,以及工艺和材料等等。
1 人工焊接
小型工件通常采用手动工作站执行焊接工作,例如焊接珠宝或者修复工具。
2 应用
有时候,激光束只需要沿着单一的移动轴焊接。比如使用缝焊接机或者管焊接系统进行管材焊接或者缝焊接。
3 系统和机器人
激光束通常连接以立体焊接几何结构为特征的三维零件。采用五轴基于坐标的激光单元和一组可移动的光学配件。
4 扫描振镜或者远程焊接
扫描振镜在离工件很远的距离引导激光束,而在其他焊接方法中,光学透镜是在离工件很近的距离引导激光束。
扫描振镜依靠一个或者两个可移动的反射镜,快速定位激光束,使得复位焊缝之间的光束所需时间接近为0,从而提高产能,适用于生产大量的短焊缝,并可以优化焊接顺序来保证较小的热量输入和畸变。
5 远程焊接系统
远程焊接系统有两种实现方式。第一种是一个远程焊接系统。工件放置在扫描光学振镜下工作区域内,然后被焊接。在短时间内焊接大量零件时,在光学振镜下通过机器连续不断地运输零件,这个过程被称作飞行焊接。
第二种是承载扫描光学振镜的机器人执行大的移动量,同时,扫描光学振镜保证激光束沿着工件来回移动时的精密定位。机器控制同步机器人和扫描光学透镜的重叠移动,它测量机器人几毫米内的精确的空间位置,控制系统将测量的位置与程序路径对比。如果检测到偏差,就会通过扫描光学振镜进行补偿控制。
激光焊接将变得更容易
在线沟通,请点我在线咨询
咨询热线:
13925799771
客服qq:
3284009399