- 东莞市常盈五金有限公司

- 全国服务热线
13925799771
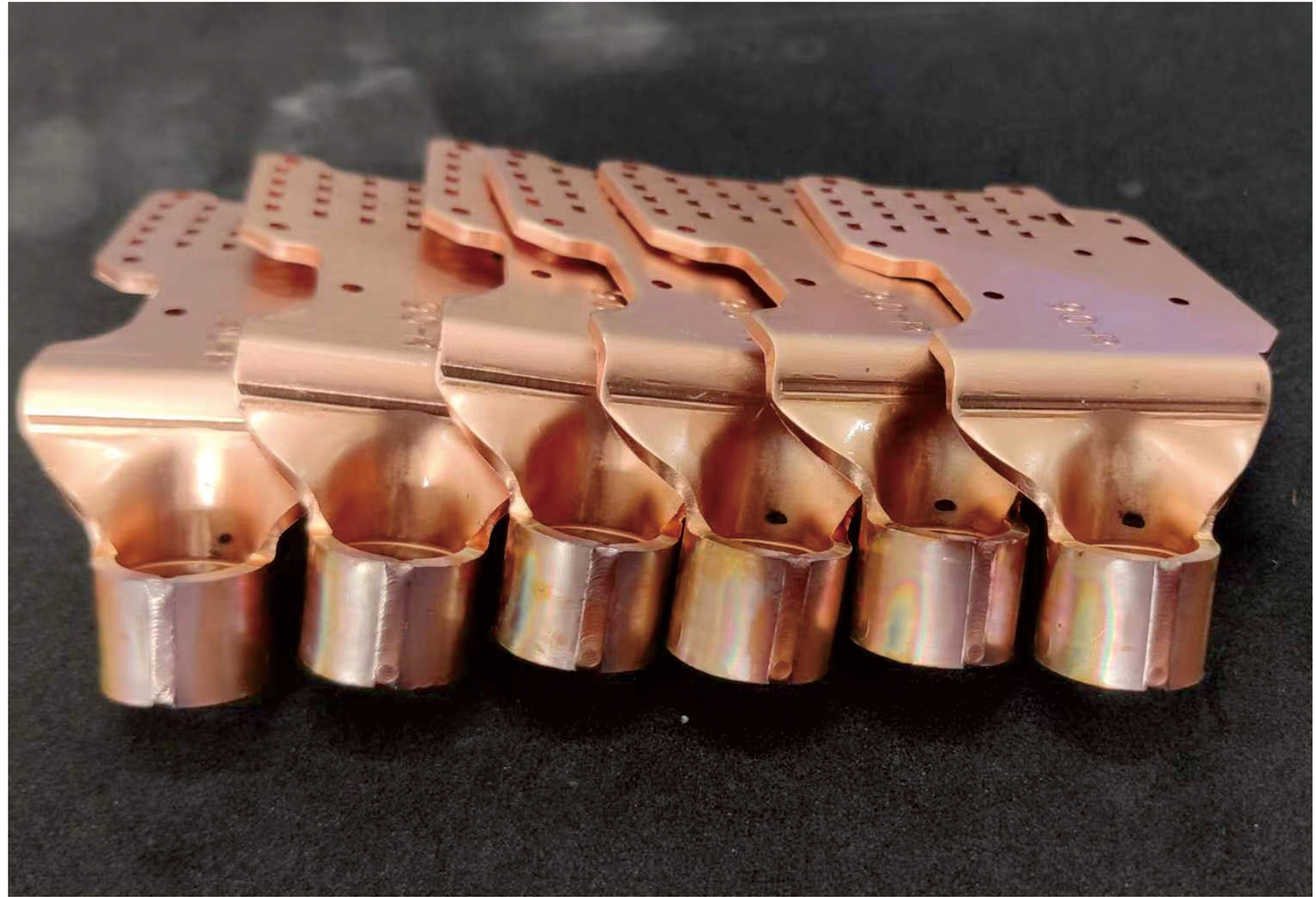
主营紫铜激光焊接加工、铝合金激光焊接加工、不锈钢激光焊接加工、铁制品、镀锌板激光焊接加工,有需要欢迎咨询!
 东莞市常盈五金有限公司
东莞市常盈五金有限公司
在激光焊接中,保证间隙误差的一种方法是通过施加较大压力来补偿工件的形状误差。如轿车车身顶缝焊接的夹持系统经常使用压力滚轮或其他工具来夹紧搭接焊缝,一方面防止焊接过程中工件的变形,另一方面可保证焦点与工件表面之间位置的相对恒定。
通常,喷嘴到工件的距离在3~10mm的范围之间,典型的喷嘴孔直径在4—8mm之间,一般气体压力较低,气体流速在8~30L/min之间。图3-30为C02和Nd: YAG激光器应用较为广泛的焊接喷嘴典型形状。
为了使焊接光学元件免受焊接中所产生的粉尘污染和飞溅的影响,人们提出了几种横向喷射式喷嘴的设计思想。它们的基本原理都是考虑使气流垂直穿过激光束,针对不同的技术要求,或是用于吹散焊接烟尘,或是利用高动能使金属颗粒转向。3.10 激光焊接加工系统
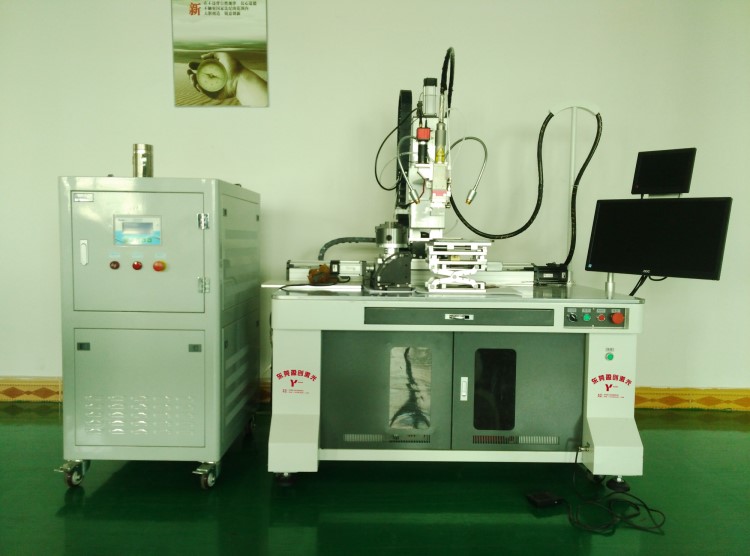
一般激光焊接加工系统主要由以下几个部分组成:
(1)激光器;
(2)加工机床或工作台;
(3)内外光路的冷却系统;
(”导光系统及光束聚焦系统(反射镜、透射镜及光纤元件等);
(5)工作气体(包括供气装置和喷嘴等);
(6)控制系统及检测系统(包括控制器、操作系统、数控软件及生产技术软件等)o
对于激光器和光束引导、聚焦系统,前文已有详细的介绍,下面将对激光焊接设备的其他部分进行介绍。3.10.1加工系统
加工系统的主要任务是承载工件并使工件与激光束作相对运动,加工精度在很大程度上取决于加工系统的精度和激光束运动时的可调精度。光束运动的调节和加工系统的运动轨迹都是靠敬控系统来控制的。加工系统需要有良好的数控系统和可靠的检测、反馈系统,才可能生产出精确的产品。加工系统的形式很多,主要有数控机床、工作台及焊接机器人等。激光器与不同的焊接加工系统相结合可以大大提高激光焊接的应用范围。
根据工件和激光加工头的空间运动形式可以将激光焊接加工的运动系统分为简单和复杂两种。在简单的运动系统中,材料只能在固定激光束下作线性运动或简单的旋转,而在复杂的多轴运动系统则可以进行三维轨迹的焊接。下面分别对一维、二维和三维三种运动系统进行简单介绍。
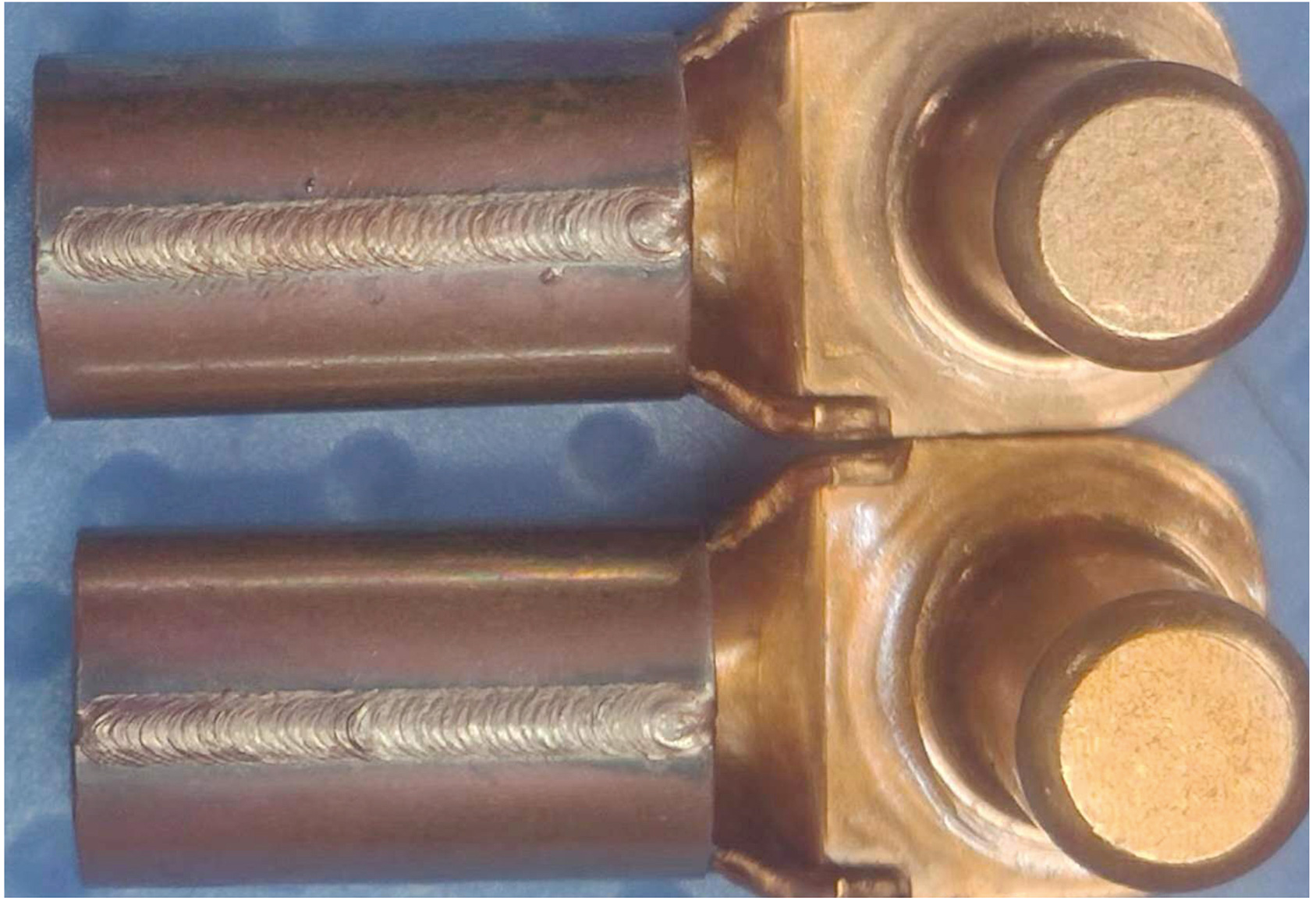
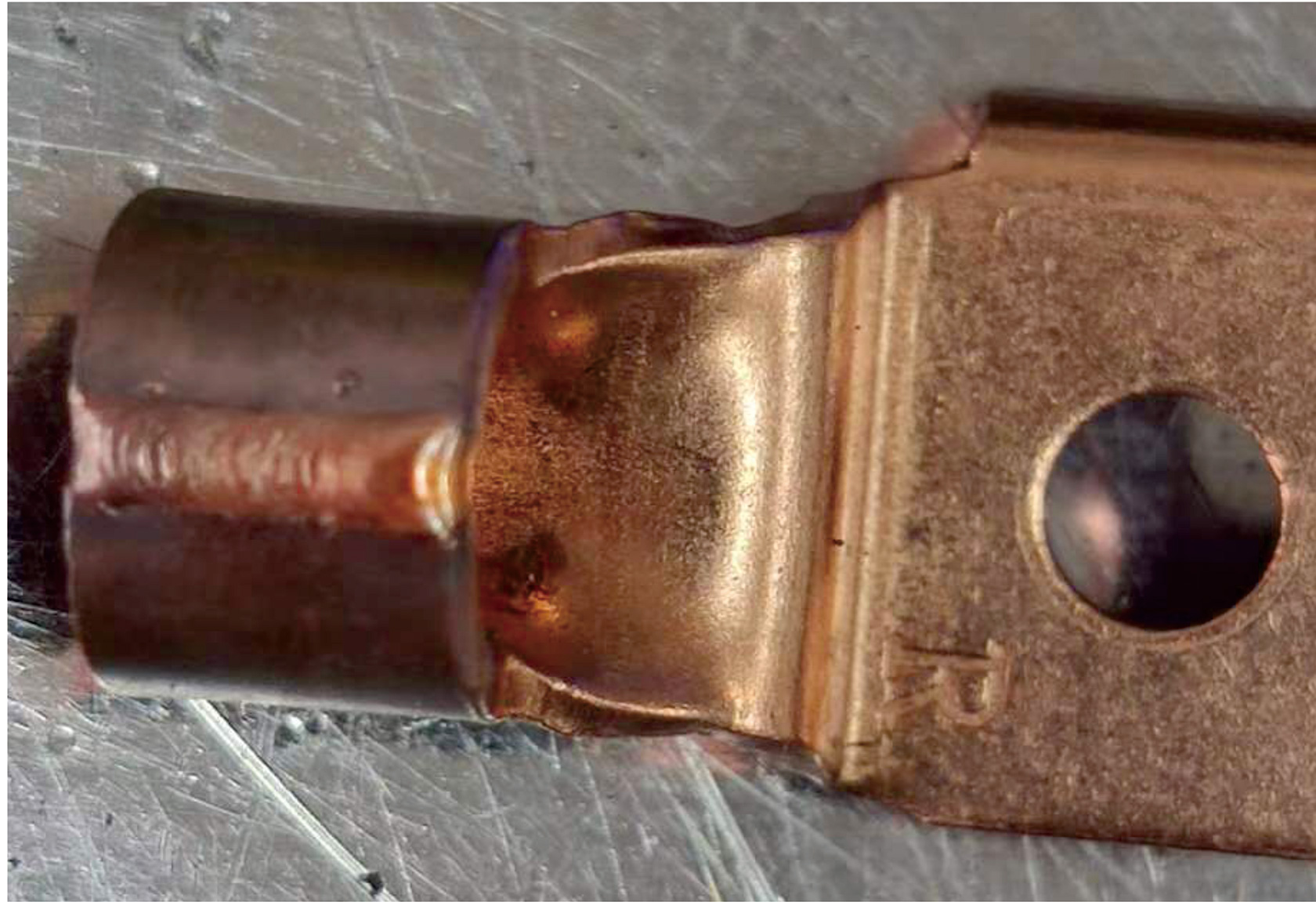
1)一维运动系统
一维系统是对所有只允许沿着一个方向进行加工操作的系统的总称,例如,管、横截面或条状工件的焊接加工。而且,这些系统经常在焊接加工头上安装额
外的直线调整机构以精确调节焊接位置。
2)二维运动系统
二维运动系统主要用于加工平板金属材料,在管与横截面的加工中应用也较多。二维焊接系统主要分为以下三种形式:①固定光束(光束传输系统固定);②运动光束(工件固定);③混合系统(光轴和工作台均可运动)o每种形式都有各自的优缺点,一般来说,固定光束的系统在相同或相似工件的大批量焊接时效率较高。
在二维运动系统中,可采用先进的飞动元件,其运动元件的质量较小,光束引导元件的惯性较低(如在飞动光学系统中的移动式反射镜),能够以很高的速度和加速度运动,同时还可保证较高的重复精度和定位精度,这对于复杂形状工件的加工特别重要。现代的CNC运动系统一般可以获得较高的加工精度,大多数情况下,使用传统的机器人达不到这种加工所需的精度。
3)三维运动系统
对于三维的焊接加工来说,可使用5轴龙门架系统、机器人系统或远距离焊接系统。
在龙门架系统中,通过3个相互垂直的直线轴来进行定位,较常用的是“半飞动光学系统”o光学系统沿着两个轴运动,工件固定沿着一个方向运动。为了保证激光束以正确的角度入射到工件的表面,龙门架系统一般还备有两个旋转轴用于激光头的定位。对于C02激光,其先束传输可以采用柔性臂单元,Nd: YAG激光则可通过光纤来进行传输。
机器人系统主要用于焊接三维的零部件,如轿车车身。相对于龙门架系统,机器人系统更高效、更经济。但在使用机器人系统时,必须事先检查该系统是否具有所需的加工精度和动特性。机器人系统有三种运动方式:激光器运动、光束运动和工件运动。
远距离焊接系统可大幅度提高焊接效率和焊接质量,在不久的将来,有望取代目前使用的常规运动系统。远距离焊接系统无需光束传输运动臂,主要是利用光学镜片的转动来改变加工位置。对于连续点焊来说,是一个高速运动系统,激光束在焊缝之间的运动速度可以大于2m/sO采用这种方式,远距离焊接将成为电阻点焊的一个有力的竞争对手。一个成功的远距离焊接系统,需要一个光束质量高( >5mm.mrad)的大功率(>3kW)激光器。在长焦距的聚焦系统(f>1.6m)作用下,该系统可以形成一个锥状的工作范围,如图3-31所示,以每分钟超过100个点的焊接速度焊接轿车车门和其他的几何形状o除了焊点外,也可以形成各种形状的焊缝,例如,阶梯形、圆形、半圆形和波纹形等,所有的这些都是通过软件来控制的。图3-31 远距离激光焊接系统一I:作原理3.10.2控制系统和检测系统
整个焊接系统应采朋-个中央控制器来控制,这样可以使激光器与运动系统相协调。控制器要有较高的采样速率才能有效地处理编码器信号,以保证运动的精度和平稳性。为了快速处理信息,控制器还应具备预读程序信息的能力,以便在保持恒定速率的情况下,焊接方向改变时改变加速度。对于多任务加-1-过程,焊接系统通常采用ir37机数字控制器(CNC),这可使多轴控制更具灵活性。
由-J:实际零件的公差,加上系统本身或加工程序的不精确,许多焊接应用中经常需要对加.L_头实际位置相对于程序中定义的路径进行校正。目前已经开发出大量的基于不同传感技术的定位控制系统,这些定位控制系统主要包括位置传感器、焊缝检测传感器和夹具加I头。
位氍传感器主要包括电容式、接触式及轴式等几种类型。电容式位置传感器在J:业中较为常用,它是通过测量电容的变化来进行距离的测量,该电容随工件表面到喷嘴端部的距离而变化。接触式位置传感系统主要用于加工非导电材料,如塑料或木材,在这些系统中,实际距离是通过与工件表面接触的传感器来测定的。在许多情况下传感器按环形同轴方式被安装在切割喷嚼的周围,这种位置传感器是使用现有加I:系统的轴或通过安装有切割光学元件的附加轴来控制。
在激光焊接中,焊前准备的误差、坐标轴的运动偏差、夹紧误差及夹具的磨损等因素都可能引起定位误差,甚至会导致被焊构件的焊缝不完整,而且激光焊。
在线沟通,请点我在线咨询
咨询热线:
13925799771
客服qq:
3284009399